Media Summary: Data-Driven Control of Insect Flapping Flight via Deep Reinforcement Learning ICRA 2021 conference paper Jonathan Hoff and Joohyung Kim University of Illinois Urbana-Champaign Abstract: Underactuated ... Course Introduction by Prof. Debasattam Pal.
Data Driven Control Of Flapping - Detailed Analysis & Overview
Data-Driven Control of Insect Flapping Flight via Deep Reinforcement Learning ICRA 2021 conference paper Jonathan Hoff and Joohyung Kim University of Illinois Urbana-Champaign Abstract: Underactuated ... Course Introduction by Prof. Debasattam Pal. Interpretability for Moving Toward Verification of Advanced and Lecture by Frank Allgöwer as part of the Summer School "Foundations and Mathematical Guarantees of Active learning of robot dynamical systems using information maximization of Koopman operators. Paper submitted. Work by Ian ...
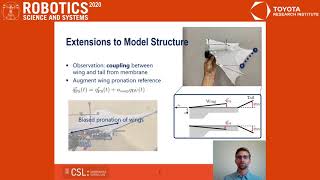
This is the accompanying video for our paper entitled " RSS 2020 conference paper Jonathan Hoff and Seth Hutchinson University of Illinois at Urbana-Champaign Georgia Institute of ...