Media Summary: A video that demonstrates the data completeness of This video shows a (rehearsal for a) 5-minute short talk that was presented at Robotics: Science and Systems (RSS) in 2014 in ... The talk was presented during the IEEE International Conference on Intelligent Transportation Systems 2021 (IEEE ITSC): ...
Ct Sampling Circular Trajectory Out - Detailed Analysis & Overview
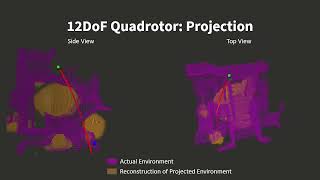
A video that demonstrates the data completeness of This video shows a (rehearsal for a) 5-minute short talk that was presented at Robotics: Science and Systems (RSS) in 2014 in ... The talk was presented during the IEEE International Conference on Intelligent Transportation Systems 2021 (IEEE ITSC): ... This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Video accompanying the paper "Learning a Generalizable The TESCAN CoreTOM is our general purpose system optimized for high quality imaging of a wide range of
A short scan fulfils Tuy's condition and the Radon sphere is completely Brown University Physics Demonstration: The shadow of a ball on a turntable rotating in uniform Welcome to this complete overview of EPA Method 1 used in stack emission testing and QSTI preparation. In this video, you will ...