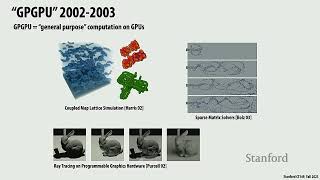
Media Summary: University of Khartoum,Faculty of Engineering. CUDA programming abstractions, and how they are implemented on modern GPUs To follow along with the course, visit the ...
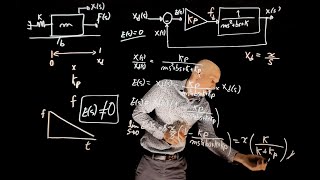
Control System Lecture 7 - Detailed Analysis & Overview
University of Khartoum,Faculty of Engineering. CUDA programming abstractions, and how they are implemented on modern GPUs To follow along with the course, visit the ...