Media Summary: Control for improving cooperative localization using bearing-only relative measurements Smart Munitions: Cooperative Homing using Cooperative Localization This paper studies the measurement scheduling problem for a group of N mobile robots moving on a flat surface that are ...
Control For Improving Cooperative Localization - Detailed Analysis & Overview
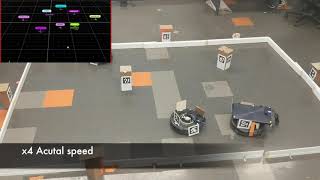
Control for improving cooperative localization using bearing-only relative measurements Smart Munitions: Cooperative Homing using Cooperative Localization This paper studies the measurement scheduling problem for a group of N mobile robots moving on a flat surface that are ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod O.7 Authors: Ahmad, Aamir; Lawless, Guilherme; Lima, Pedro U. Target Defense with Cooperative Localization (AAAI2023)Moving Landmark assisted Distributed Learning based Decentralized
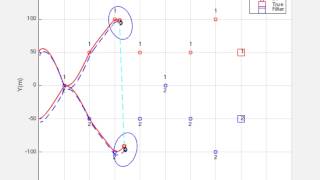
For more information, please refer to: X. Shen, S. Pendleton, and M. H. Ang Jr., "Scalable Four vehicles: only one has access to GPS and the rest have the range and bearing information. This is a brief overview of CoLo: A Performance Evaluation System for Multi-robot