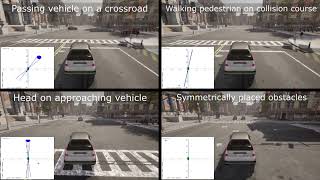
Media Summary: This video shows the simulations and experimental results that validate the efficacy of a coalition cone MAE 207 Safety for Autonomous Systems Guest Lecturer: Jason Choi, UC Berkeley, Abstract: In this paper, we propose a new class of
Control Barrier Functions In Ugvs - Detailed Analysis & Overview
This video shows the simulations and experimental results that validate the efficacy of a coalition cone MAE 207 Safety for Autonomous Systems Guest Lecturer: Jason Choi, UC Berkeley, Abstract: In this paper, we propose a new class of Autonomy advances have enabled robots in diverse environments and close human interaction, necessitating controllers with ... Control Barrier Function In Action (Obstacle Avoidance) In this video, a ground rover safely reaches its goal location using a consolidated
In this work, we develop a novel and safe Learning for Safety-Critical Control with 1-min supplementary video to the figures in the following paper: Sander Tonkens and Sylvia Herbert, "Refining