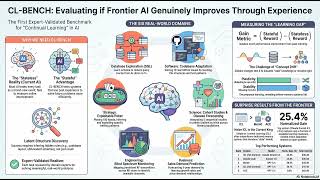
Media Summary: We have models that pass the bar exam and write functional code in seconds. But if you actually use them for real work, you ... We are excited to feature Ameya Prabhu, who is currently a Postdoctoral Researcher at Tübingen AI Center and will discuss ... Continual Learning Bench: Evaluating Frontier AI Systems in Real World Stateful Environments
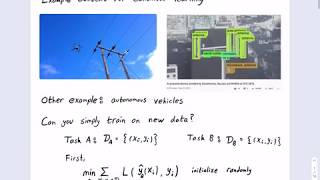
Continual Learning For Traversability Prediction - Detailed Analysis & Overview
We have models that pass the bar exam and write functional code in seconds. But if you actually use them for real work, you ... We are excited to feature Ameya Prabhu, who is currently a Postdoctoral Researcher at Tübingen AI Center and will discuss ... Continual Learning Bench: Evaluating Frontier AI Systems in Real World Stateful Environments Abstact: Autonomous navigation in off-road conditions requires an accurate estimation of terrain [25-9-2020] This Friday 5pm CEST Martin Mundt will present the paper: Title: “A Wholistic View of Accepted for the 2024 IEEE International Conference on Robotics and Automation (ICRA 2024) Link to the paper: ...





![[Open World Lifelong Learning Course] Lecture #8: Learning & prediction in presence of the unknown](https://i.ytimg.com/vi/JTxE4Pz_yvQ/mqdefault.jpg)




