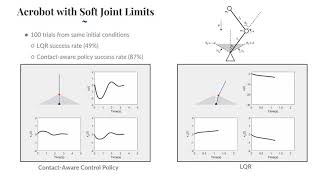
Media Summary: This video is the virtual presentation for the ICRA 2020 paper " We develop simple, but provably stable, control policies that leverage tactile sensing along traditional state feedback. We propose a control framework which can utilize tactile information by exploiting the complementarity structure of
Contact Aware Controller Design For - Detailed Analysis & Overview
This video is the virtual presentation for the ICRA 2020 paper " We develop simple, but provably stable, control policies that leverage tactile sensing along traditional state feedback. We propose a control framework which can utilize tactile information by exploiting the complementarity structure of Video for the paper Easing Reliance on Collision-free Planning with Aerial manipulation (AM) promises to move Un- manned Aerial Vehicles (UAVs) beyond passive inspection to The paper will be presented @ ICRA 2023 Preprint: Human-robot collaborative disassembly is ...
by Marijan Vukosavljev, Ivo Jansen, Mireille E. Broucke, and Angela P. Schoellig Paper: ... Video submission for the paper titled: Adaptive Force A rare and powerful sequence of cosmic events is unfolding — and July through August 2026 may mark one of the most ... Social acceptance is a major hurdle for autonomous vehicle technology, central to which is ensuring both passengers and nearby ...




![[ICRA2026] Aerial Manipulation with Contact-Aware Onboard Perception and Hybrid Control](https://i.ytimg.com/vi/5gcPD-OCGPg/mqdefault.jpg)





