Media Summary: Senior Design Project by Emily Hernandez, Alex Domagala, Pranay Singh, and Jon Perthel Electrical and Using a wide field of view camera, CMM-Manager is able to warn user when clamps and other In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ...
Computer Vision Based Obstacle Avoidance - Detailed Analysis & Overview
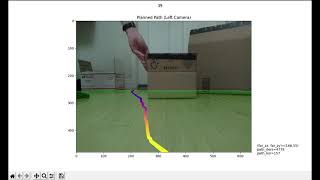
Senior Design Project by Emily Hernandez, Alex Domagala, Pranay Singh, and Jon Perthel Electrical and Using a wide field of view camera, CMM-Manager is able to warn user when clamps and other In this work, we study the effects that perception latency has on the maximum speed a robot can reach to safely navigate through ... Institut für Automatisierungstechnik (IAT), Universität Bremen (ROS, OpenCV, Stereo Stereo Camera Autonomous Navigation: Obstacle Avoidance & Path-Planning Video presentation of: J. Liu, H. Zhu and J. Alonso-Mora, "Robust
EVReflex: Dense Time-to-Impact Prediction for Event-