Media Summary: Athabasca University COMP444 Final Project V4 Comp 444: Final Project - Automatic Outdoor Watering System with FADS Athabasca University COMP444 Final Project V3
Comp 444 Final Project - Detailed Analysis & Overview
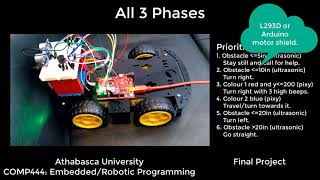
Athabasca University COMP444 Final Project V4 Comp 444: Final Project - Automatic Outdoor Watering System with FADS Athabasca University COMP444 Final Project V3 Athabasca University COMP444 Final Project Demonstrating the different behavior of the rover depending on obstacle distance. Athabasca University COMP444 Final Project V2
My autonomous rover driving in an enclosed area to demonstrate obstacle and cliff avoidance. Final library working for the BlueERS system that I used for my Robotic arm using 3 servos for movement, a joystick or controlling the arm and a button to open and close the claw.