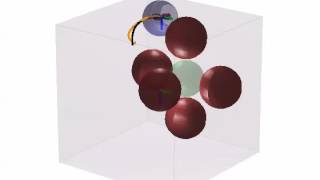
Media Summary: More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. In this video we present the Relaxed-constraint Triple Integrator Planner (R-TIP) which enables safe execution of ... Application of artificial potential field to perform
Collision Avoidance Simulation Using Mb1200 - Detailed Analysis & Overview
More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. In this video we present the Relaxed-constraint Triple Integrator Planner (R-TIP) which enables safe execution of ... Application of artificial potential field to perform Autonomous Driving Vehicle and Reinforcement Learning in Unreal Engine Python Implementation of Reciprocal Velocity Obstacle (RVO) for Multi-agent Systems Guo, M., & Zavlanos, M. M. (2018). Reach Control improves the effectiveness, accuracy and control of Reach System manipulators. It packages an intuitive HMI