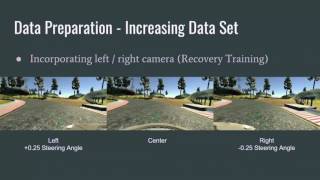
Media Summary: The simulated vehicle was manually driven on the Lake Track for 10 laps, 5 in one direction and 5 in the other. Virtual camera ... The simulated vehicle was manually driven on the Mountain Track for 20 laps. Lane-keeping was observed by driving the vehicle ... This project uses the Udacity Simulator, where I first drove the car manually and recorded that data. This data was now used to ...
Behavioural Cloning Deep Learning Pid - Detailed Analysis & Overview
The simulated vehicle was manually driven on the Lake Track for 10 laps, 5 in one direction and 5 in the other. Virtual camera ... The simulated vehicle was manually driven on the Mountain Track for 20 laps. Lane-keeping was observed by driving the vehicle ... This project uses the Udacity Simulator, where I first drove the car manually and recorded that data. This data was now used to ... The aim of this project is to design and train a Implementation of PilotNet on udacity's simulator, repo on: