Media Summary: An implementation of the arm control system from Living Control Systems III (William T. Powers), with the addition of a layer for the ... If you're not ready to fight on night one, it's already too late. Here's how NAWCAD's Joint NATO pilots from five allied partners trained as a joint force at the Naval Air Warfare Center Aircraft Division (NAWCAD)'s Joint ...
Baxter Simulation Environment Program 2 - Detailed Analysis & Overview
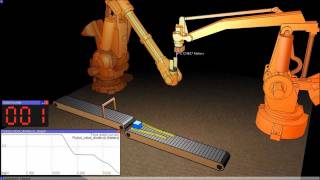
An implementation of the arm control system from Living Control Systems III (William T. Powers), with the addition of a layer for the ... If you're not ready to fight on night one, it's already too late. Here's how NAWCAD's Joint NATO pilots from five allied partners trained as a joint force at the Naval Air Warfare Center Aircraft Division (NAWCAD)'s Joint ... V-REP - the Virtual Robot Experimentation Platform - is a 3D robot Fixed targets for both arms (yellow points); active self collision and obstacle avoidance control with moving obstacle (cylinder).