Media Summary: This paper is accepted by the IEEE Transactions on Robotics (T-RO) for publication. B-spline based motion planning for a 2D lab-scale overhead crane The Wolfram Demonstrations Project contains thousands of free interactive ...
B Spline Obstacle Avoidance Using - Detailed Analysis & Overview
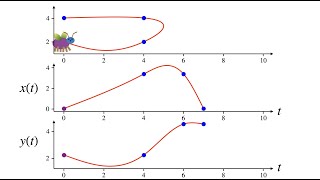
This paper is accepted by the IEEE Transactions on Robotics (T-RO) for publication. B-spline based motion planning for a 2D lab-scale overhead crane The Wolfram Demonstrations Project contains thousands of free interactive ... ... only distributed upon the MPI but also we distributed across the threads Equivalent to a 50 minute university lecture on The video shows the experiment of grasping and placing the brick in the Gazebo simulator by
The Wolfram Demonstrations Project contains ... Cessna scenario 2 Avoidance using B-splines