Media Summary: Yuke Zhu UT Austin February 18, 2022 Recent years have witnessed great strides in deep learning for robotics. Tech Panel: This panel will describe the importance of
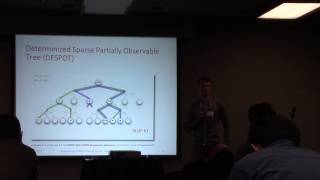
Autonomy Talks Peter Karkus Compositional - Detailed Analysis & Overview
Yuke Zhu UT Austin February 18, 2022 Recent years have witnessed great strides in deep learning for robotics. Tech Panel: This panel will describe the importance of