Media Summary: Hackathon submission for the ATS GmbH challenge at ETH Hackathon Munich 2026. Three This is a quick demo of "Scientific Pathfinder", an In this 8-minute developer focused demo, Diksha Upadhyay shares a new Microsoft
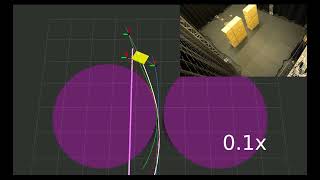
Autonomous Multi Uav Graph Explorer - Detailed Analysis & Overview
Hackathon submission for the ATS GmbH challenge at ETH Hackathon Munich 2026. Three This is a quick demo of "Scientific Pathfinder", an In this 8-minute developer focused demo, Diksha Upadhyay shares a new Microsoft This video is provided as supplementary material for the paper "Entropy-Regularized Intent-Aware MAPPO for Cooperative ...