Media Summary: This video demonstrates the performance of nested This video demonstrates the simulation of model predictive controller ( All my courses are listed here: The world is changing! The technology is changing!
Autonomous Landing Using Mpc Pid - Detailed Analysis & Overview
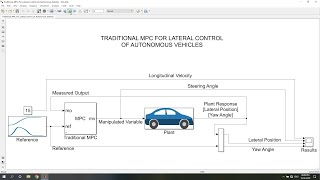
This video demonstrates the performance of nested This video demonstrates the simulation of model predictive controller ( All my courses are listed here: The world is changing! The technology is changing! This video demonstrates the simulation of a traditional model predictive controller ( In this video two control techniques are applied to a quadrotor helicopter UAV. Gain-Scheduled This scenario assessed the stability of a quadrotor under external disturbance.
This video presents the first hardware validation flight for my Master's thesis project, RAPTOR (Real-Time Adaptive Path Planning ... Michael Tay, Rockwell Automation, explains how to achieve all the advantages of Model Predictive Control (