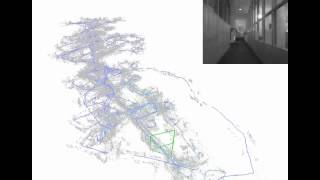
Media Summary: In a paper slated for the Intelligent Robots and Systems conference in Portugal next month, For decades, academic and industry researchers have been working on control algorithms for autonomous helicopters — robotic ... Nine hours of stereo imagery processed using a visual SLAM system. The vehicle travels 11km over 10 floors in the
Automatic Building Mapping At Mit - Detailed Analysis & Overview
In a paper slated for the Intelligent Robots and Systems conference in Portugal next month, For decades, academic and industry researchers have been working on control algorithms for autonomous helicopters — robotic ... Nine hours of stereo imagery processed using a visual SLAM system. The vehicle travels 11km over 10 floors in the Z.-S. Fu*, P. Z. X. Li*, S Karaman, V. Sze, “Gleanmer: A 6 mW SoC for Real-Time 3D Gaussian Occupancy (Author information and Acknowledgments temp. removed!) Simultaneous Localization and The Space Architecture Design Studio is a collaboration between