Media Summary: Lecture 22, part 3 of 3 1. Path planning with a 2-link robot 2. Avoidance of hundreds of moving obstacles using a path pre-computed to be free of collision with static obstacles to guide a ... ... that's a goal now that's how the robot goes
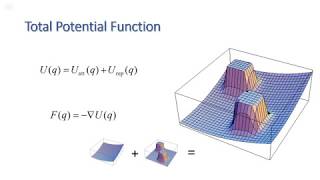
Artificial Potential Field Circle - Detailed Analysis & Overview
Lecture 22, part 3 of 3 1. Path planning with a 2-link robot 2. Avoidance of hundreds of moving obstacles using a path pre-computed to be free of collision with static obstacles to guide a ... ... that's a goal now that's how the robot goes lidar Files and manual are given here: In this ROS2 Jazzy and ... One of our first runs.... The robot is using an

![[13] Understanding Artificial Potential Fields using 1D Simple Example - Full details in MATLAB](https://i.ytimg.com/vi/fKTTjocOnkc/mqdefault.jpg)