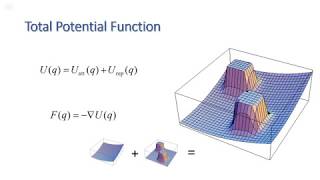
Media Summary: In this simulation 4 obstacles are placed side by side creating a wall. Each obstacle is represented as a Gaussian Potential Field and Navigation Function Controls The local planner method is illustrated in this video:
Apf Navigation Potential Function - Detailed Analysis & Overview
In this simulation 4 obstacles are placed side by side creating a wall. Each obstacle is represented as a Gaussian Potential Field and Navigation Function Controls The local planner method is illustrated in this video: