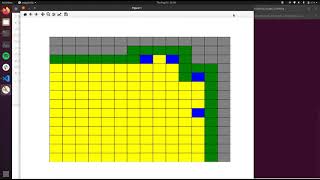
Media Summary: Video from the published paper "Optimizing and Predicting Swarming Collective Motion Performance for Complete Coverage of an a priori Unknown Environment using a Single Autonomous System Scenario 2 ... the concept of coverage path planning. The video is based on the article named "BA*: an online
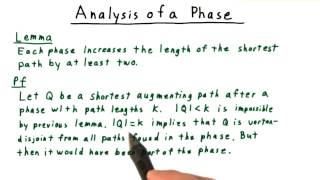
Analysis Of Compelte Coverage Algorithm - Detailed Analysis & Overview
Video from the published paper "Optimizing and Predicting Swarming Collective Motion Performance for Complete Coverage of an a priori Unknown Environment using a Single Autonomous System Scenario 2 ... the concept of coverage path planning. The video is based on the article named "BA*: an online This course is a university-level exploration of Want to raise your Solidity test coverage reliably and prevent regressions before they reach main? Near- Speaker: Maria Luiza Costa Vianna (École Polytechnique, Laboratoire d'Informatique (LIX), Palaiseau, and ENSTA Bretagne ...
This is the presentation for our work at ICRA 2025. Feel free to contact us at Ashley.Foster.plymouth.ac.uk.









![An Efficient NSGA-II-based Algorithm for Multi-Robot Coverage Path Planning [ICRA 2025]](https://i.ytimg.com/vi/5JHAO7yrw0s/mqdefault.jpg)