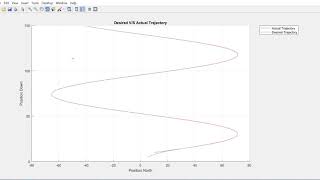
Media Summary: The video shows how the tracked robot is able to adapt the sub-tracks to the terrain profile, given a planned rail path. ICRA 2021 Best Automation Paper Award Finalist. The video shows a MATLAB implementation of a UAV tracking a 3D
Adaptive Robust Three Dimensional Trajectory - Detailed Analysis & Overview
The video shows how the tracked robot is able to adapt the sub-tracks to the terrain profile, given a planned rail path. ICRA 2021 Best Automation Paper Award Finalist. The video shows a MATLAB implementation of a UAV tracking a 3D MOBILE ROBOTICS: METHODS & ALGORITHMS - WINTER 2023 University of Michigan - NA 568/EECS 568/ROB 530 For slides, ... Paper was published at IEEE L-CSS and presented at the virtual ACC 2021. Authors: Maja Trumic, Cosimo Della Santina, Kosta ...