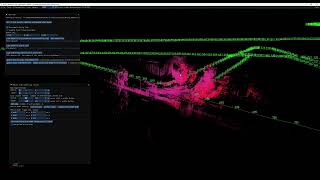
Media Summary: Active Loop Closure for OSM-guided Robotic Mapping in Large Scale Urban Environments (IROS 2024) Talk Resource-Efficiently to Me: Optimal Communication Planning for Distributed Performing GMAPPING SLAM with Pioneer 2DX and RPLIDAR A1M8 at Ryerson University.
Active Loop Closure For Osm - Detailed Analysis & Overview
Active Loop Closure for OSM-guided Robotic Mapping in Large Scale Urban Environments (IROS 2024) Talk Resource-Efficiently to Me: Optimal Communication Planning for Distributed Performing GMAPPING SLAM with Pioneer 2DX and RPLIDAR A1M8 at Ryerson University. The supplied video for the paper "A fast, complete, point cloud based This work develops iterative Covariance Regulation (iCR), a novel method for This video provides some intuition around Pose Graph Optimization—a popular framework for solving the simultaneous ...
Team 7 Mobile Robotics at University of Michigan EECS568/ROB530/NAVARCH568. Deep learning-based Visual Odometry and Loop Closure for SLAM Goals of this exercise: - implement odometry for a simple differential wheel platform - observe uncertainty due to wheel-slip and ...