Media Summary: ... of toronto and we'd like to present our work on Computer Vision Day 1 20 April 2021 Speaker: Lukas Schmid, ETH Zurich (collaboration Microsoft Swiss Joint Research Center – Day 2 – Computer vision and Mixed Reality "Robust
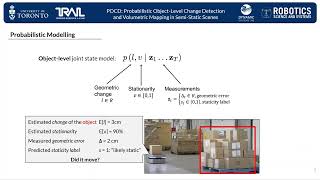
Accelerating Probabilistic Volumetric Mapping Using - Detailed Analysis & Overview
... of toronto and we'd like to present our work on Computer Vision Day 1 20 April 2021 Speaker: Lukas Schmid, ETH Zurich (collaboration Microsoft Swiss Joint Research Center – Day 2 – Computer vision and Mixed Reality "Robust NCCR Robotics (online) Seminar Series on Flying and Legged Robots 14 October 2021 Victor is a PhD student at the ... This video is forwarded 2x. This video is a reproduction of the video done here: