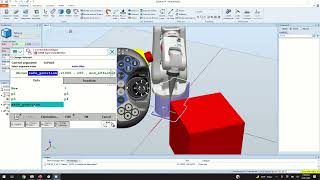
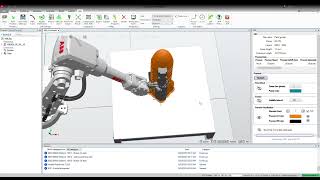
Media Summary: The project demonstrates a few examples in This video is an introductory video to RAPID language, a language to programm In this video, Michael Bartczak explains how to simulate and code the gripper (end-effector) and pick and place tasks in
Abb Robotstudio Basic Control Of - Detailed Analysis & Overview
The project demonstrates a few examples in This video is an introductory video to RAPID language, a language to programm In this video, Michael Bartczak explains how to simulate and code the gripper (end-effector) and pick and place tasks in To check all signal after you have set signal robot This is