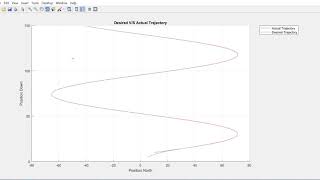
Media Summary: Mastered Fundamental Robotics Concepts And Analyzed Key Formulations ∗ Rigid-Body Dynamics, Forward and Inverse ... Now I understand why people just use PID or MPC for something more. PID is much easier and good enough... Green - Desired ... The video shows a MATLAB implementation of a UAV
A Precision Trajectory Tracing Controller - Detailed Analysis & Overview
Mastered Fundamental Robotics Concepts And Analyzed Key Formulations ∗ Rigid-Body Dynamics, Forward and Inverse ... Now I understand why people just use PID or MPC for something more. PID is much easier and good enough... Green - Desired ... The video shows a MATLAB implementation of a UAV author Quang Nhat Le (quangle.edu) * Complex The video shows the experimental results obtained by comparing a classical PD This video showcases experiments for our recent paper entitled "