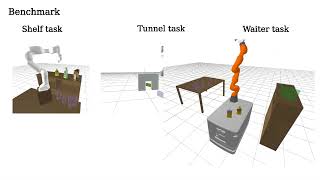
Media Summary: This work aims at leveraging instructional video to guide the solving of complex A Multi-Contact Motion Planning and Control Strategy for Physical Interaction Tasks Multimedia attachment of the paper "STL-Based
A Multi Contact Motion Planning - Detailed Analysis & Overview
This work aims at leveraging instructional video to guide the solving of complex A Multi-Contact Motion Planning and Control Strategy for Physical Interaction Tasks Multimedia attachment of the paper "STL-Based Supplementary video for the IROS 2023 paper "Differentiable Task Assignment and Traversing a steep ramp with a mobile manipulator that balances with its hands. We use a learned traversability prediction to ... Short presentation of the paper: J. Kottinger, S. Shaull Almagor, and M. Lahijanian, “Explainable
Robotic mobility in microgravity is necessary to explore asteroids and to aid astronauts in space stations. However, dynamic ... RSS 2019 workshop, Freiburg (Germany) Organizers: Romeo Orsolino, Carlos Mastalli, Michele Focchi and Nicolas Mansard ... Supplementary video for the article "A receding-horizon Transformations, Angular representations, Metrics, Efficient collision checking See ... Organization, Introduction, Problem Formulation See Justin Kottinger, Shaull Almagor, and Morteza Lahijanian, "MAPS-X: Explainable