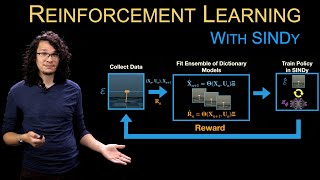
Media Summary: Pick-and-place (PnP) operations, featuring object grasping and trajectory planning, are fundamental in industrial robotics ... Accepted Paper at the Fourth Machine Learning in Planning and Control of Robot Motion Workshop at ICRA 2020 ... Access the full material here: In this video I am taking ...
A Data Efficient Model Based - Detailed Analysis & Overview
Pick-and-place (PnP) operations, featuring object grasping and trajectory planning, are fundamental in industrial robotics ... Accepted Paper at the Fourth Machine Learning in Planning and Control of Robot Motion Workshop at ICRA 2020 ... Access the full material here: In this video I am taking ... CS forum is a seminar series arranged at the Aalto University CS department - open to everyone free-of-charge. 13 February 2020 ... Autonomy Talks - 22/02/2022 Speaker: Dr. Ugo Rosolia, California Institute of Technology Title: Learning MPC: Lecture 6 of a 6-lecture series on the Foundations of Deep RL Topic:
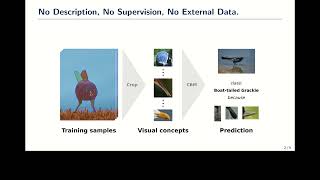
Happy to present our joint work on Interpretability published at ICML 2025. Authors: Katharina Prasse*, Patrick Knab*, Sascha ... Presentation of our paper accepted at ICLR workshop on world