Media Summary: In this work a novel approach for target reaching and collision avoidance in industrial robot manipulators is proposed. This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Lecture 5 "Screw theory and Lie groups: spatial kinematics"
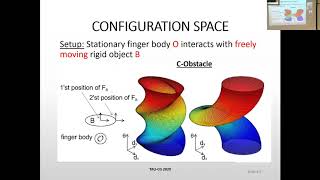
A Configuration Space Reference Generation - Detailed Analysis & Overview
In this work a novel approach for target reaching and collision avoidance in industrial robot manipulators is proposed. This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Lecture 5 "Screw theory and Lie groups: spatial kinematics" This lecture is part of the MSc in Data Science at Skoltech, year 2021-2022. As countless examples show, sequences of complicated objects should be studied all at once via the formalism of MIT 8.06 Quantum Physics III, Spring 2018 Instructor: Barton Zwiebach View the complete course:
A talk by Elon Rimon in CG TAU seminar December 2, 2020. Full title: Physics 105: Analytical Classical Mechanics Taught by Professor Aaron Lee Saint Mary's College of California, Spring 2023 ... Many computations in robotics can be dramatically accelerated if the robot