Media Summary: Rover MR4 grabbing a ball using a mounted MandleBot Botomaton's new architecture: direct drive on Traditionally, performing a 6-DOF (6 degrees of freedom) test on my new
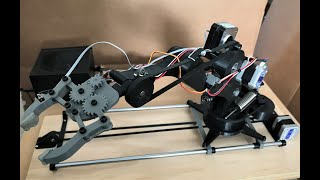
5 Axis Robot Arm Prototype - Detailed Analysis & Overview
Rover MR4 grabbing a ball using a mounted MandleBot Botomaton's new architecture: direct drive on Traditionally, performing a 6-DOF (6 degrees of freedom) test on my new You can find the code and the full instructions on my site: Support me making more projects like this on ... Find all the components and screws you need here :