Media Summary: Paper presented in the 2023 International Conference on Robotics and Automation (ICRA) Authors: Seyed Saber Mohammadi, ... We introduce a new diffusion-based approach for This video is about our Siggraph Asia 2022 paper: Bowen Zhang, Xi Zhao, He Wang and ...
3dsgrasp 3d Shape Completion For - Detailed Analysis & Overview
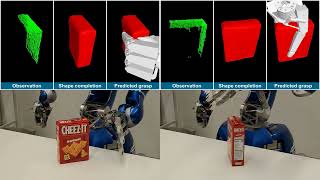
Paper presented in the 2023 International Conference on Robotics and Automation (ICRA) Authors: Seyed Saber Mohammadi, ... We introduce a new diffusion-based approach for This video is about our Siggraph Asia 2022 paper: Bowen Zhang, Xi Zhao, He Wang and ... Grasping objects with limited or no prior knowl- edge about them is a highly relevant skill in assistive robotics. Still, in this general ... We propose the Multiple View Performer (MVP) - a new architecture for According to Aristotle, “the whole is greater than the sum of its parts”. This statement was adopted to explain human perception by ...
This paper tackles the task of category-level pose estimation for garments. With a near infinite degree of freedom, a garment's full ... Here, we present GEOGRASP. It is a method to find the best pair of grasping points given a three-dimensional point cloud with the ...

![[ICRA 2023] SCARP: 3D Shape Completion in ARbitrary Poses for Improved Grasping (Conference Video)](https://i.ytimg.com/vi/lyEc991wyTI/mqdefault.jpg)





![[ECCV2020] Towards Precise Completion of Deformable Shapes](https://i.ytimg.com/vi/WItN8SueDpM/mqdefault.jpg)



