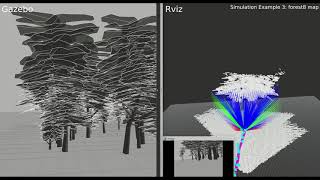
Media Summary: Stimulation of scanning rooms using a robot wandering along the wall. Task 5 in Robot Craft 2018. 13th International Workshop on the Algorithmic Foundations of Robotics (WAFR 2018) Authors: Vasileios Vasilopoulos, Daniel E. Accepted to the 2023 International Conference on Robotics and Automation (ICRA), London.
3d Reactive Navigation Challenge - Detailed Analysis & Overview
Stimulation of scanning rooms using a robot wandering along the wall. Task 5 in Robot Craft 2018. 13th International Workshop on the Algorithmic Foundations of Robotics (WAFR 2018) Authors: Vasileios Vasilopoulos, Daniel E. Accepted to the 2023 International Conference on Robotics and Automation (ICRA), London. Show the execution (in a gazebo simulation environment) of the Omur Arslan and Daniel E. Koditschek, "Sensor-based Fourth IEEE International Conference on Robotic Computing (IRC) Paper: Code ...
autonomousvehicles VISUAL ODOMETRY. Explore real-time car ...