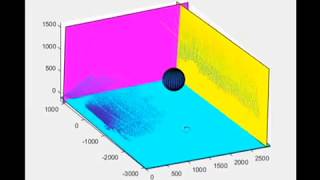
Media Summary: Scenario recreated using a point cloud segmentation, path planning achieved by Dijkstra's Algorithm. DRQN-based 3D Obstacle Avoidance with a Limited Field of View Unmanned underwater vehicles (UUVs) have become indispensable tools for inspection, maintenance, and repair operations in ...
3d Obstacle Avoidance Based On - Detailed Analysis & Overview
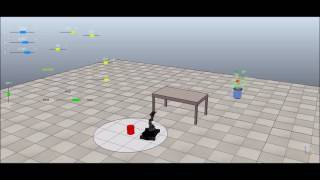
Scenario recreated using a point cloud segmentation, path planning achieved by Dijkstra's Algorithm. DRQN-based 3D Obstacle Avoidance with a Limited Field of View Unmanned underwater vehicles (UUVs) have become indispensable tools for inspection, maintenance, and repair operations in ... Obstacle avoidance by AUV simulated in 3D scene Dr. Harsha Abeykoon's experimental videos. Department of Electrical Engineering University of Moratuwa Sri Lanka. We present a hybrid feedback approach to solve the navigation problem of a point mass in the n−dimensional space containing ...
Lets explore building a self steering ship that can automatically move out of the way of Demonstration of a 3-DOF robotic arm performing autonomous Undergraduate Student Project Department of Electrical Engineering University of Moratuwa Sri Lanka.