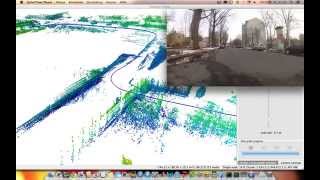
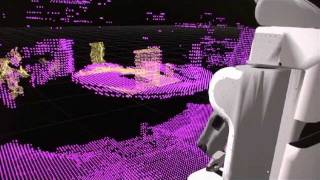
Media Summary: Szene aufgenommen mit GoPro (Video) und ibeo Lux Laserscanner, welche rückwärtig angeordnet waren. Weiterverarbeitung ... This video presents results from integrating the PR2 scans an environment including objects on a table. The measurements are integrated into a hierarchical
3d Mapping Using Octomap Webots - Detailed Analysis & Overview
Szene aufgenommen mit GoPro (Video) und ibeo Lux Laserscanner, welche rückwärtig angeordnet waren. Weiterverarbeitung ... This video presents results from integrating the PR2 scans an environment including objects on a table. The measurements are integrated into a hierarchical ... robots operating in unstructured and cluttered environments require 3D Mapping with OctoMap Go2 Quaruped Robot ROS2 Jazzy Gazebo Harmonic WIP prototype for multi-Kinect2 work cell. Each pointcloud passes