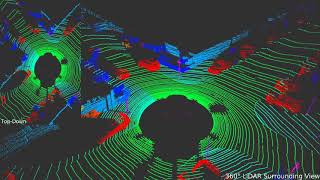
Media Summary: This is a video clip showing an autonomous vehicle how it interprets 360-degree surrounding scenes (e.g. free space, vehicle, ... real-time LIDAR semantic segmentation on KITTI using Open3D-PointNet++ Computation cost: less 20msec on 3.4GHZ CPU.
3d Lidar Semantic Segmentation Experimental - Detailed Analysis & Overview
This is a video clip showing an autonomous vehicle how it interprets 360-degree surrounding scenes (e.g. free space, vehicle, ... real-time LIDAR semantic segmentation on KITTI using Open3D-PointNet++ Computation cost: less 20msec on 3.4GHZ CPU.










![[CVPR 2023] Instant Domain Augmentation for LiDAR Semantic Segmentation](https://i.ytimg.com/vi/tnheIfyQkqc/mqdefault.jpg)
