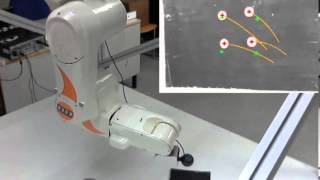
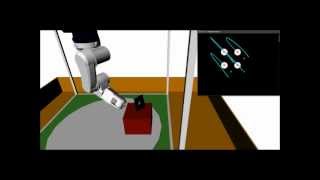
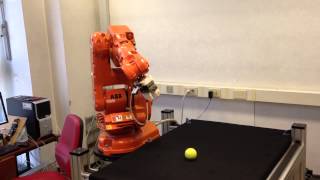
Media Summary: Implementation of IBVS proposed by Weiss and Sanderson. The control law is based on the error between current and desired ... Implementation of IBVS proposed by Weiss and Sanderson under simulation. The control law is based on the error between ... Preliminary test PBVS contro of an ABB IRB140
2d Visual Servoing Using Industrial - Detailed Analysis & Overview
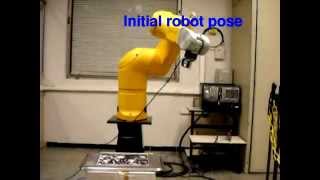
Implementation of IBVS proposed by Weiss and Sanderson. The control law is based on the error between current and desired ... Implementation of IBVS proposed by Weiss and Sanderson under simulation. The control law is based on the error between ... Preliminary test PBVS contro of an ABB IRB140 This video shows the new multirate approach for This video shows a 2.5-D VS on a 6-DOF robot arm In ITRO-14 and ITRO-12, we address the vision-based control problem where the desired pose is specified by means of a ...