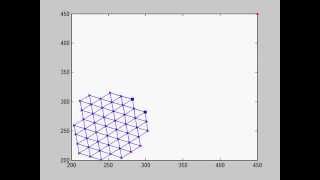
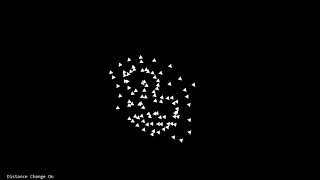
Media Summary: This is a demonstration of using CUDA to compute the Supplementary video of the article: M.S. Talamali, T. Bose, M. Haire, X. Xu, J.A.R. Marshall, A. Reina. Sophisticated Collective ... Steering Behaviors - 200 bots Flocking XNA GS 3.1
200 Agents Flocking - Detailed Analysis & Overview
This is a demonstration of using CUDA to compute the Supplementary video of the article: M.S. Talamali, T. Bose, M. Haire, X. Xu, J.A.R. Marshall, A. Reina. Sophisticated Collective ... Steering Behaviors - 200 bots Flocking XNA GS 3.1 All robots are first programed to go to the rendezvous point based on normal This video shows an experimental validation of rigidity-based kinematic translational maneuvering control of multiple unicycles ...