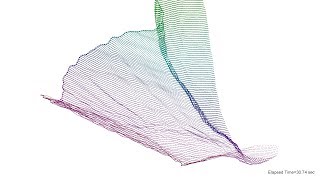
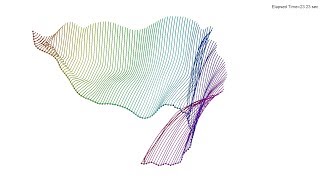
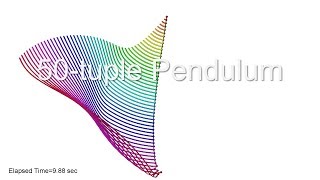
Media Summary: HiroLabo Department of Electro-Mechanical Engineering ... Li=1.0m, Mi=1.0kg (i=1,2,...120), thetazero=pi/2.0 Time step is 10^-6 sec for numerical integration of Euler method. HiroLabo ... Li=1.0m, Mi=1.0kg (i=1,2,...200), thetazero=pi/2.0 Time step is 1 microsecond for numerical integration of Euler method. HiroLabo ...
160 Tuple Pendulum Starting From - Detailed Analysis & Overview
HiroLabo Department of Electro-Mechanical Engineering ... Li=1.0m, Mi=1.0kg (i=1,2,...120), thetazero=pi/2.0 Time step is 10^-6 sec for numerical integration of Euler method. HiroLabo ... Li=1.0m, Mi=1.0kg (i=1,2,...200), thetazero=pi/2.0 Time step is 1 microsecond for numerical integration of Euler method. HiroLabo ... Li=1.0m, Mi=1.0kg (i=1,2,...120), theta_zero=pi-0.001 Time step is 1 microsecond for numerical integration of Euler method. HiroLabo Osaka Electro-Communication University Li=1.0m, Mi=1.0kg (i=1,2,...140), thetazero=pi/2.0 Time step is 1 microsecond for numerical integration of Euler method. HiroLabo ...
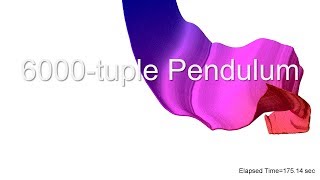
Li=1.0 m, Mi=1.0 kg, ki=1 GN/m (i=1,2,...,50) Time step is 1 microsecond for numerical integration of velocity Verlet algorithm. L1=1.2m, L2=1.0m, L3=0.8m, L4=0.6m, L5=0.4m, L6=0.2m M1=1.2kg,M2=1.0kg,M3=0.8kg,M4=0.6kg,M5=0.4kg,M6=0.2kg ... Li=1.0m, Mi=1.0kg (i=1,2,...140), thetazero=pi-0.001 Time step is 1 microsecond for numerical integration of Euler method. Li=1.0m, Mi=1.0kg (i=1,2,...100), thetazero=pi-0.001 Time step is 10^-7 sec for numerical integration of Euler method. HiroLabo ...