Media Summary: TCOptRob Seminar: Numerical Optimization for Learn how to design, simulate, and implement Online planning of whole-body motions for legged robots is challenging due to the inherent nonlinearity in the robot dynamics.
A Nonlinear Model Predictive Control - Detailed Analysis & Overview
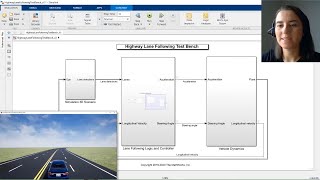
TCOptRob Seminar: Numerical Optimization for Learn how to design, simulate, and implement Online planning of whole-body motions for legged robots is challenging due to the inherent nonlinearity in the robot dynamics. Simulink and MATLAB are used to implement Lecture at the First ELO-X Seasonal School and Workshop (March 22, 2022). Contents of this video: - Prof. Toshiyuki Ohtsuka, Kyoto University, Japan. Date: Tuesday, November 22, 2022.